

{kind=link}
Knowledge drift happens when machine studying fashions are deployed in environments that not resemble the info on which they have been educated. On account of this alteration, mannequin efficiency can deteriorate. For instance, if an autonomous unmanned aerial automobile (UAV) makes an attempt to visually navigate with out GPS over an space throughout inclement climate, the UAV could not be capable to efficiently maneuver if its coaching knowledge is lacking climate phenomena corresponding to fog or rain.
On this weblog put up, we introduce Portend, a brand new open supply toolset from the SEI that simulates knowledge drift in ML fashions and identifies the right metrics to detect drift in manufacturing environments. Portend can even produce alerts if it detects drift, enabling customers to take corrective motion and improve ML assurance. This put up explains the toolset structure and illustrates an instance use case.
Portend Workflow
The Portend workflow consists of two levels: the info drift starting stage and the monitor choice stage. Within the knowledge drift starting stage, a mannequin developer defines the anticipated drift situations, configures drift inducers that can simulate that drift, and measures the impression of that drift. The developer then makes use of these ends in the monitor choice stage to find out the thresholds for alerts.
Earlier than starting this course of, a developer will need to have already educated and validated an ML mannequin.
Knowledge Drift Planning Stage
With a educated mannequin, a developer can then outline and generate drifted knowledge and compute metrics to detect the induced drift. The Portend knowledge drift stage contains the next instruments and parts:
Drifter—a instrument that generates a drifted knowledge set from a base knowledge setPredictor—a part that ingests the drifted knowledge set and calculates knowledge drift metrics. The outputs are the mannequin predictions for the drifted knowledge set.
Determine 1 beneath provides an outline of the info drift starting stage.
{kind=link}

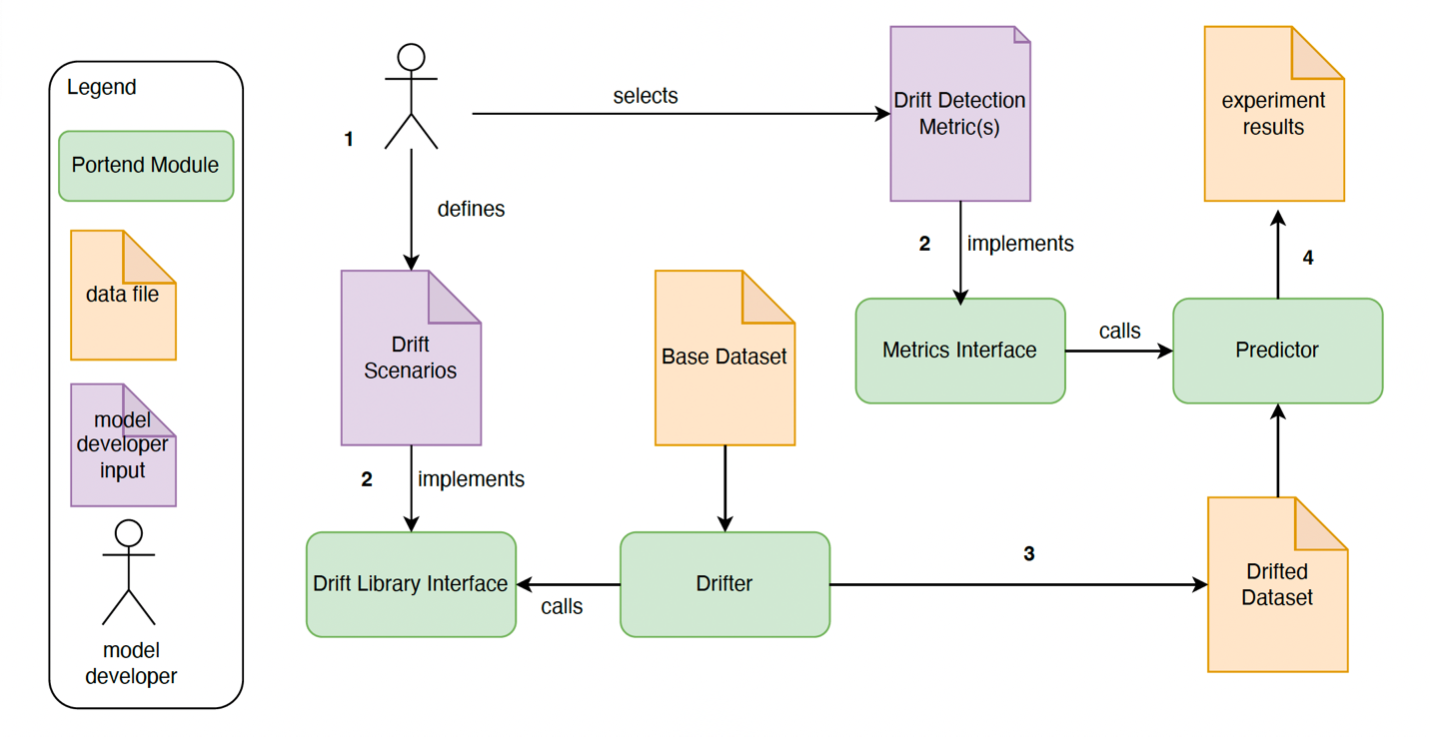
Determine 1: Portend knowledge drift planning experiment workflow. In step 1, the mannequin developer selects drift induction and detection strategies based mostly on the issue area. In step 2, if these strategies will not be at the moment supported within the Portend library, the developer creates and integrates new implementations. In step 3, the info drift induction technique(s) are utilized to supply the drifted knowledge set. In step 4, the drifted knowledge is offered to the Predictor to supply experimental outcomes.
The developer first defines the drift eventualities that illustrate how the info drift is prone to have an effect on the mannequin. An instance is a situation the place a UAV makes an attempt to navigate over a recognized metropolis, which has considerably modified how it’s considered from the air because of the presence of fog. These eventualities ought to account for the magnitude, frequency, and period of a possible drift (in our instance above, the density of the fog). At this stage, the developer additionally selects the drift induction and detection strategies. The particular strategies rely on the character of the info used, the anticipated knowledge drift, and the character of the ML mannequin. Whereas Portend helps a lot of drift simulations and detection metrics, a person can even add new performance if wanted.
As soon as these parameters are outlined, the developer makes use of the Drifter to generate the drifted knowledge set. Utilizing this enter, the Predictor conducts an experiment by operating the mannequin on the drifted knowledge and gathering the drift detection metrics. The configurations to generate drift and to detect drift are impartial, and the developer can attempt completely different combos to seek out probably the most applicable ones to their particular eventualities.
Monitor Choice Stage
On this stage, the developer makes use of the experimental outcomes from the drift starting stage to research the drift detection metrics and decide applicable thresholds for creating alerts or other forms of corrective actions throughout operation of the system. The purpose of this stage is to create metrics that can be utilized to watch for knowledge drift whereas the system is in use.
The Portend monitor choice stage contains the next instruments:
Selector—a instrument that takes the enter of the planning experiments and produces a configuration file that features detection metrics and beneficial thresholdsMonitor—a part that will probably be embedded within the goal exterior system. TheMonitortakes the configuration file from theSelectorand sends alerts if it detects knowledge drift.
Determine 2 beneath exhibits an outline of all the Portend instrument set.
{kind=link}
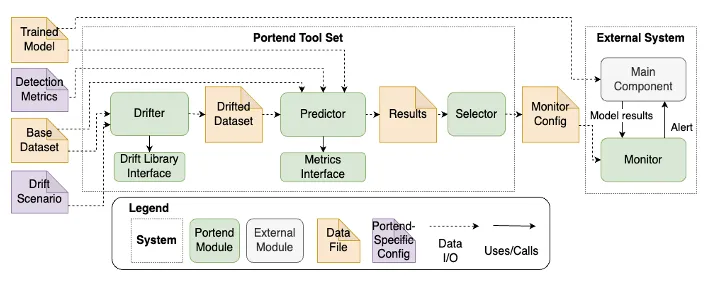
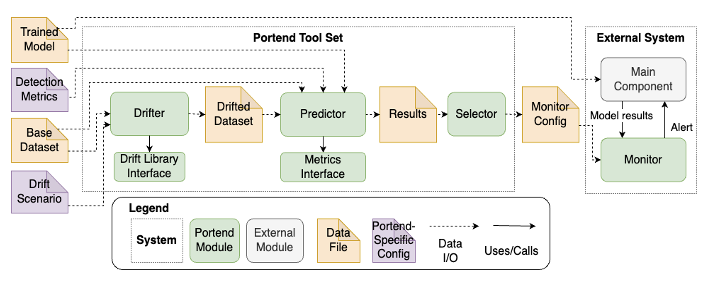
Determine 2: An summary of the Portend instrument set
Utilizing Portend
Returning to the UAV navigation situation talked about above, we created an instance situation for instance Portend’s capabilities. Our purpose was to generate a monitor for an image-based localization algorithm after which take a look at that monitor to see the way it carried out when new satellite tv for pc photos have been offered to the mannequin. The code for the situation is on the market within the GitHub repository.
To start, we chosen a localization algorithm, Wildnav, and modified its code barely to permit for extra inputs, simpler integration with Portend, and extra strong picture rotation detection. For our base dataset, we used 225 satellite tv for pc photos from Fiesta Island, California that may be regenerated utilizing scripts out there in our repository.
With our mannequin outlined and base dataset chosen, we then specified our drift situation. On this case, we have been considering how the usage of overhead photos of a recognized space, however with fog added to them, would have an effect on the efficiency of the mannequin. Utilizing a method to simulate fog and haze in photos, we created drifted knowledge units with the Drifter. We then chosen our detection metric, the common threshold confidence (ATC), due to its generalizability to utilizing ML fashions for classification duties. Primarily based on our experiments, we additionally modified the ATC metric to higher work with the sorts of satellite tv for pc imagery we used.
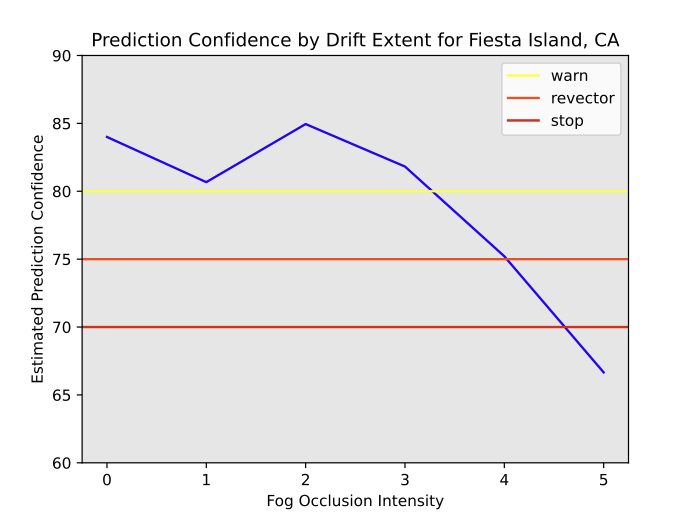
As soon as we had the drifted knowledge set and our detection metric, we used the Predictor to find out our prediction confidence. In our case, we set a efficiency threshold of a localization error lower than or equal to 5 meters. Determine 3 illustrates the proportion of matching photos within the base dataset by drift extent.
{kind=link}
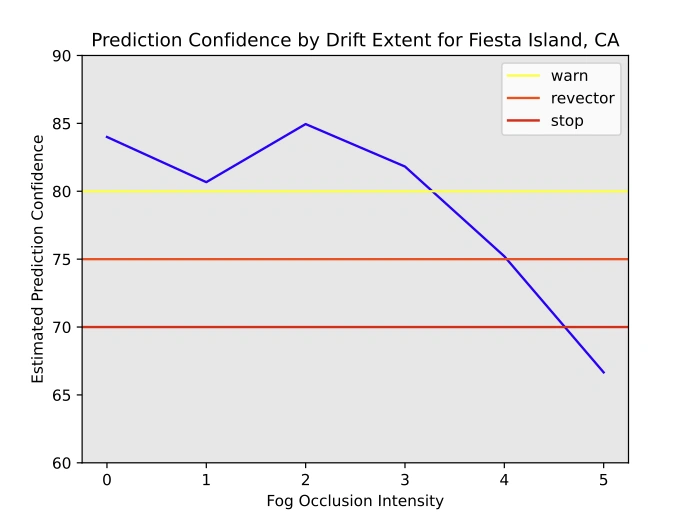
Determine 3: Prediction confidence by drift extent for 225 photos within the Fiesta Island, CA dataset with proportion of matching photos.
With these metrics in hand, we used the Selector to set thresholds for alert detection. In Determine 3, we are able to see three potential alert thresholds configured for this case, that can be utilized by the system or its operator to react in several methods relying on the severity of the drift. The pattern alert thresholds are warn to simply warn the operator; revector, to counsel the system or operator to seek out an alternate route; and cease, to suggest to cease the mission altogether.
Lastly, we applied the ATC metric into the Monitor in a system that simulates UAV navigation. We ran simulated flights over Fiesta Island, and the system was capable of detect areas of poor efficiency and log alerts in a approach that might be offered to an operator. Which means that the metric was capable of detect areas of poor mannequin efficiency in an space that the mannequin was in a roundabout way educated on and offers proof of idea for utilizing the Portend toolset for drift planning and operational monitoring.
Work with the SEI
We’re in search of suggestions on the Portend instrument. Portend at the moment accommodates libraries to simulate 4 time collection situations and picture manipulation for fog and flood. The instrument additionally helps seven drift detection metrics that estimate change within the knowledge distribution and one error-based metric (ATC). The instruments will be simply prolonged for overhead picture knowledge however will be prolonged to help different knowledge sorts as properly. Screens are at the moment supported in Python and will be ported to different programming languages. We additionally welcome contributions to float metrics and simulators.
Moreover, if you’re considering utilizing Portend in your group, our group will help adapt the instrument to your wants. For questions or feedback, electronic mail [email protected] or open a problem in our GitHub repository.